Le système solaire
La force d’attraction gravitationnelle
Le repère de Frenet
Étude simplifiée du mouvement
Quelques éléments sur l’étude générale
L’activité 12.3 de 2nde peut être traitée en guise d’introduction.

Source : Wikipédia
– Monsieur, vous travaillez mal !
– Je suis un novice !
Ceci pour retenir que nous avons dans l’ordre : Soleil, Mercure, Vénus, Terre, Mars, Jupiter, Saturne, Uranus et Neptune.
En prime, quelques informations sur ces astres :
| Planète | Réq (km) | m (kg) | T (j) | a (km) | e |
| Soleil | 696 000 | 198 900 000·1022 | - | - | - |
| Mercure | 2 440 | 33·1022 | 87,97 | 57,91·106 | 0,205 630 69 |
| Vénus | 6 052 | 487·1022 | 224,70 | 108,21·106 | 0,006 773 23 |
| Terre | 6 378 | 597·1022 | 365,26 | 149,60·106 | 0,016 710 22 |
| Mars | 3 402 | 64·1022 | 686,96 | 227,94·106 | 0,093 412 33 |
| Jupiter | 71 492 | 189 900·1022 | 4 335,35 | 778,41·106 | 0,048 392 66 |
| Saturne | 60 268 | 56 850·1022 | 10 757,74 | 1 421,18·106 | 0,054 150 60 |
| Uranus | 25 559 | 8 681·1022 | 30 799,10 | 2 876,68·106 | 0,047 167 71 |
| Neptune | 24 961 | 10 240·1022 | 60 224,90 | 4 498,25·106 | 0,008 585 87 |
Réq représente le rayon de l’astre mesuré au niveau de son équateur, a est le demi grand axe de l’orbite et e son excentricité (plus d’info sur ces deux grandeurs dans la page sur les ellipses).

mX et mY en kilogramme
r en mètre
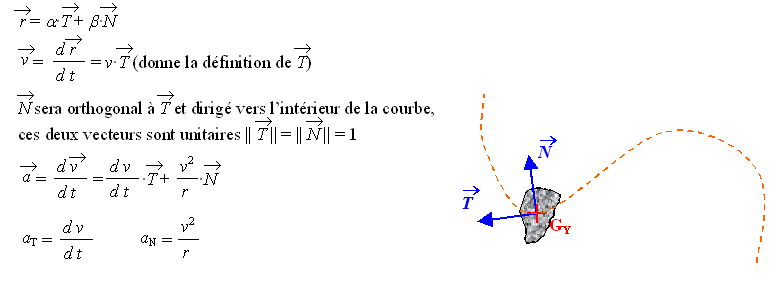

La conclusion est alors la suivante :
–  Î [0 ; p/2[ : mouvement accéléré ;
Î [0 ; p/2[ : mouvement accéléré ;
– = p/2 : mouvement uniforme ;
– Î ]p/2 ; p] : mouvement décéléré.
 Þ a = 0 & b = -r.
Þ a = 0 & b = -r.Dans un référentiel lié à l’astre X et supposé galiléen, on utilise la deuxième loi de Newton :

L’hypothèse simplificatrice nous conduit à une trajectoire circulaire. Les données sur les planètes du système solaire vont nous permettre d’infirmer ou de confirmer la validité de l’hypothèse :
| Planète | e |  (%) (%)
|
| Mercure | 0,205 630 69 | 21 |
| Vénus | 0,006 773 23 | 0,023 |
| Terre | 0,016 710 22 | 0,14 |
| Mars | 0,093 412 33 | 4,4 |
| Jupiter | 0,048 392 66 | 1,2 |
| Saturne | 0,054 150 60 | 1,5 |
| Uranus | 0,047 167 71 | 1,1 |
| Neptune | 0,008 585 87 | 0,037 |
t représente le “taux d’ellipticité”, plus il est faible plus on se rapproche du cercle, plus il est grand plus l’ellipse sera aplatie. Notre hypothèse est donc valable pour 7 planètes sur 8 !
– trajectoire circulaire ;
– trajectoire elliptique ;
– trajectoire parabolique ;
– trajectoire hyperbolique.
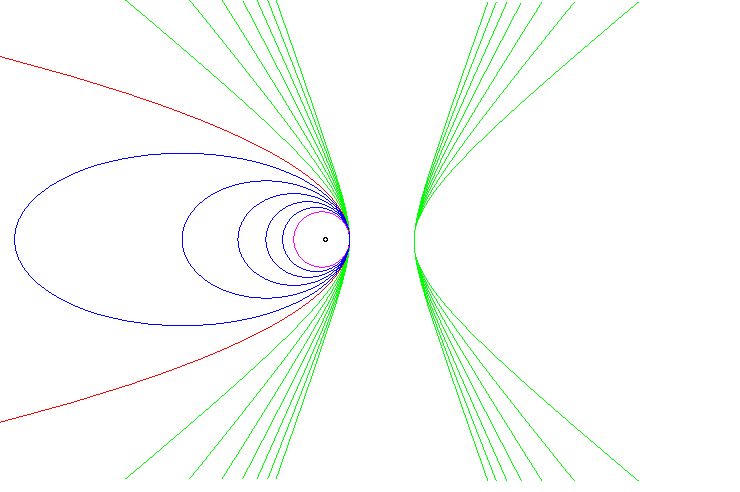
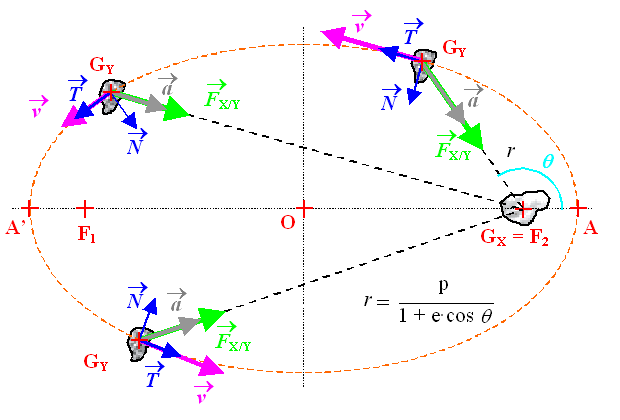
La moitié du temps, B est accéléré par la force gravitationnelle et l’autre moitié du temps, elle le ralentit.
Pour les curieux, j’ai ajouté une page sur les ellipses en mathématiques.


 . La période de révolution T est la durée nécessaire pour parcourir toute l’ellipse ; a = [OA] = [A’A]/2, pour l’orbite circulaire [OF2] = 0 d’où r = [OA] = [F2A].
. La période de révolution T est la durée nécessaire pour parcourir toute l’ellipse ; a = [OA] = [A’A]/2, pour l’orbite circulaire [OF2] = 0 d’où r = [OA] = [F2A].